Voyis VSLAM powered by EIVA NaviSuite 1.0.0.1
Free Download Voyis VSLAM powered by EIVA NaviSuite 1.0.0.1 | 828.6 Mb
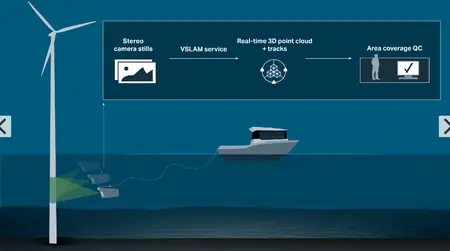
Voyis VSLAM Powered by EIVA NaviSuite is a computer vision software product which generates real-time QC displays of area coverage such as 3D point cloud and trajectory Description - using only your Discovery Stereo camera for input. The result is improved survey quality assurance during acquisition, as well as enhanced ROV visual inspection results by linking high-quality stills with true-scale 3D point clouds in real time.
Optimal acquisition with augmented ROV piloting
To minimise the risk of incomplete or inaccurate data collection, ROV pilots can look at real-time 3D point clouds and evaluate what was covered, as well as where to go next. For example, noise in trajectory Description data or holes in your point cloud will alert you to low quality data, and you can take action immediately, minimising time spent on re-survey.
The real-time displays of trajectory Description also supplement navigation sensor setups for pilot situational awareness, such as sonar, enhancing your existing camera's capabilities.
Streamlines your workflow when combined with NaviSuite software
No third-party software required - with Voyis VSLAM Powered by EIVA NaviSuite, your Discovery Stereo camera control, survey data acquisition, ROV piloting and surveying displays are all available on the topside computer. Surveyors using NaviPac Pro can benefit from the VSLAM solution's seamless integration with their current navigation and control software user interface - in which you can register observations, take snapshots, as well as load background maps and 3D models. This helps you achieve a more streamlined workflow for efficient survey data acquisition.
Home Page-
https://www.eiva.com/products/navisuite/navisuite-acquisition-software/voyis-vslam-powered-by-eiva-navisuiteLinks are Interchangeable - No Password - Single Extraction